
Enabling the IoT, part 3: The basics of coexistence
June 08, 2017
Blog

In the previous article in this series, we discussed how Bluetooth and Wi-Fi use the shared ISM band and impose challenges in their coexistence. In this part, we will talk about the basics of...
In the previous article in this series, we discussed how Bluetooth and Wi-Fi use the shared ISM band and impose challenges in their coexistence. In this part, we will talk about the basics of coexistence, their types, and adaptive frequency hopping. Read Enabling the IoT, part 2: Coexistence – living in the same neighborhood here.
For the coexistence of Bluetooth and Wi-Fi, both Bluetooth and Wi-Fi devices need to be able to transmit and receive reliably. This requires that transmit data from Bluetooth and Wi-Fi devices do not collide (i.e., an intended receiver does not receive data from more than one transmitter at the same frequency at the same time) without impacting data rate drastically. For example, a Bluetooth device transmitting at 2406 MHz and a Wi-Fi device transmitting at Channel 1 will collide. In this case, for both devices to operate in the same area, when the Bluetooth device is transmitting at 2406 MHz channel, the Wi-Fi device must not use Channel 1. Similarly, the Bluetooth device must not use channels that overlap with Wi-Fi Channel 1 when Wi-Fi is transmitting on that channel.
When devices are collocated, another condition is required: the transmitter of one device must not saturate the receiver of the other. At a high level, there are two coexistence schemes available for Bluetooth and Wi-Fi coexistence: non-collaborative coexistence and collaborative coexistence.
Non-collaborative coexistence
As the name suggests, in non-collaborative coexistence, two devices that might collide don’t collaborate with each other for a smooth operation. Adaptive frequency hopping (AFH) usually falls under this category.
For a successful Bluetooth communication, the channel that is being used by a Bluetooth device at a given point in time must not be used by other Bluetooth or wireless devices that operate on the same frequency. The Bluetooth SIG added adaptive frequency hopping to the Bluetooth specification as part of version 1.2. The idea was to improve the coexistence of Bluetooth devices with each other and with other wireless technologies like Wi-Fi. As described in part 2, Bluetooth uses a frequency hopping spread spectrum to spread a narrow band signal. Adaptive frequency hopping allows devices to hop over to channels that are expected to provide less interference.
Figure 1 shows radio activity without adaptive frequency hopping. Suppose a Wi-Fi device is transmitting using Channel 1 and the Bluetooth device is using all possible channels. There may be collisions on channels that overlap with Wi-Fi channel 1.
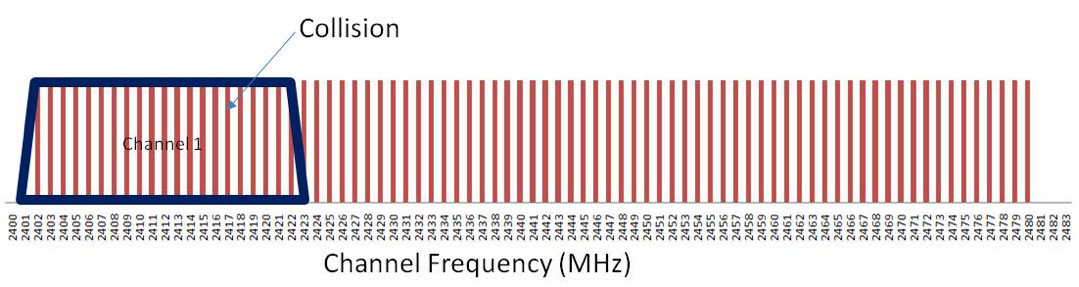
[Figure 1 | Collision between Wi-Fi and Bluetooth packet]
To avoid collisions, the Bluetooth device scans for channels that have interference and marks them unusable. Thus, when Wi-Fi is using Channel 1, there will be constant interference in the Bluetooth channels that fall within this frequency range and they will be marked unusable. AFH not only improves the reliability of Bluetooth communication, but also allows Wi-Fi devices to communicate without a major impact on Wi-Fi bandwidth. Otherwise, Wi-Fi device’s performance would be impacted severely due to CSMA-based implementations. Figure 2, in contrast, shows potential radio utilization when AFH is implemented.
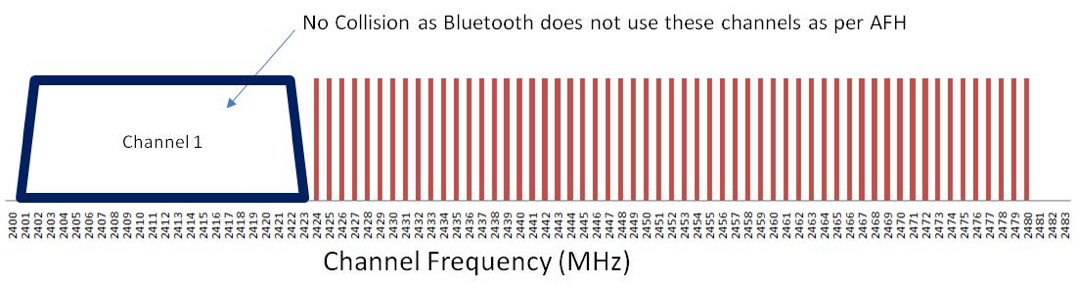
[Figure 2 | Radio utilization with AFH]
A Bluetooth device may implement AFH using the channel map derived by channel quality assessment it makes itself. Quality assessment can be either be implemented using a received signal strength indicator (RSSI) or packet error rate (PER). A Bluetooth master in a piconet can also receive channel quality data from Bluetooth slave devices. If a Bluetooth device is collocated on the same hardware as a Wi-Fi device, the host can also provide channel information to the Bluetooth device to implement a reliable channel map. However, collocation of Wi-Fi and Bluetooth has its own challenges, as motioned earlier, and requires collaborative coexistence methods.
Collaborative coexistence
With collaborative coexistence, Wi-Fi and Bluetooth devices talk to each other in real-time to implement time domain multiplexing (TDM) of the radio. IEEE 802.15.2 defines a three-wire coexistence interface to implement collaborative coexistence. Variants of 802.15.2 are implemented by silicon vendors to further improve the performance of collocated Wi-Fi and Bluetooth devices.
Before we move on to the implementation of coexistence interface, let’s look at the most important concept – atomic sequence. Atomic sequence can be described as the minimum required uninterruptible transmission to establish a reasonable communication channel between two wireless nodes. For example, Bluetooth slave devices are allowed to transmit immediately after the master device sends them a packet (TX). This TX/RX pair is considered an atomic sequence in the context of Bluetooth and cannot be interrupted without a collision. In the case of Wi-Fi, an example of an atomic sequence is a Request to Send (RTS) and Clear to Send (CTS). Another is data transmission by one device followed by an acknowledgement (ACK) from the intended device. ] In other words, transmit and receive separated by a Short Interframe Space (SIFS) interval is considered an atomic sequence in Wi-Fi technology and any interruption will result in transmit failure.
All wireless technologies inherently architect methods to protect the atomic sequence when they are using a channel. The question is, what happens when a host decides to break the sequence because of some other wireless technology? Although each wireless technology protects its atomic sequence, they are not aware of atomic sequences in other technologies. If one collocated wireless technology interrupts another during atomic sequences, it can result in a transmission failure and, hence, a degraded performance. To address this, collaborative coexistence interfaces must ensure the atomic sequence is not affected.
Next up
In the next part of this article series, we will explore three-wire and four-wire collaborative coexistence interfaces.
Cypress Semiconductor



