
Robot Design for Electromagnetic Compatibility and Functional Safety
November 02, 2020
Story

As extra automated systems become packed onto factory floors, often near human workers, equipment designers must take care to meet applicable equipment directives.
An increase in the adoption of industrial robots is predicted to achieve productivity goals and to help workers return to manufacturing jobs after the COVID-19 pandemic. As extra automated systems become packed onto factory floors, often near human workers, equipment designers must take care to meet applicable equipment directives that cover both electromagnetic compatibility and functional safety.
Automating for Safety and Productivity
It’s a given that robotic automation will continue to penetrate enterprises. While automating industrial processes is known to raise productivity, additional imperatives are emerging. Given recent events, lowering the number of humans in a workspace could also help improve workforce safety by easing social distancing.
Factories of the future are likely to contain more robots of various types, including self-contained manufacturing cells that could contain a mix of SCARA, cartesian, and linear robots, as well as collaborative robots (cobots) that are designed to work in close proximity to humans. Mobile robots, such as autonomous guided vehicles, will also be a part of the mix, used to move components and finished products between various locations.

To ensure this profusion of electrical systems can coexist, whilst remaining safe and productive, equipment designers need to consider electromagnetic emissions and immunity to interference, to comply with electromagnetic compatibility (EMC) requirements, and to ensure functional safety systems provide the desired protection.
Hazards of Electromagnetic Interference
Productivity and safety are both dependent on all the robotic systems in a factory workspace functioning correctly. A malfunction caused by one machine interfering electromagnetically with another can cause effects such as frequent system restarts, unprogrammed and unexpected movement of the robot, and possible interference with functional-safety systems. This could include false triggering of a safety mechanism, leading to unnecessary equipment stoppages, or failure of the safety protection to operate when required. Workpieces may be spoiled, causing lost production and the additional costs associated with downtime while the fault is remedied. Worse is the potential for physical injury, particularly in situations where humans are working near to unguarded robots.
Safety and EMC Standards for Industrial Robots
Businesses that own and run machines of any type need assurances that these will be safe for their employees. Whether they are interacting directly with the machine, such as using or repairing the equipment, or are simply working in the vicinity of the machine. Standards such as the EU Machinery Directive 2006/42/EC define safety requirements including the design of the machine and specific safety components. The procedures that must be used to ensure compliance with the requirements are also covered.
As more and more technologies become incorporated into machines, such as wireless connectivity, some robots may need to comply with aspects of legislation such as the EU Radio Equipment Directive (RED). It can be important for equipment producers to demonstrate that all possible hazards have been considered and that suitable standards have been applied to demonstrate conformity.
Safety requirements for industrial robots are defined in ISO 10218-1:2011, which covers inherent safe design and protective measures. ISO 10218-2:2011 pertains to robot systems and covers aspects including the design, installation, operation, and maintenance of a robot system or cell.
With the more recent emergence of collaborative robots (cobots), which are intended to operate in the same environment as human workers and typically to interact and assist directly, new safety challenges arise. Common injury hazards such as a moving robot arm colliding with a human cannot be avoided by excluding humans with guards or screening. Hence safety mechanisms such as proximity sensing are needed to minimize the risk of a collision by halting the mechanism automatically if an impact is imminent. The situation where a worker may simply walk into a cobot in a work area can also arise, which may require designers to eliminate sharp edges or cover certain parts of the robot using deformable materials. The standard ISO/TS 15066, which is related to the ISO 10218 standards, covers collaborative robots specifically.
Functional safety cannot be guaranteed, however, without reference to the potential effects of electromagnetic interference. Noise is not covered in ISO 10218 or 15066, instead, there are two IEC standards to specifically address EMC requirements concerning functional safety: the technical specifications IEC/TS 61000-1-2 and IEC 61326-3-1. These are referred to in the second edition of the principal functional safety standard, IEC 61508.
IEC 61000-1-2 presents a methodology for achieving the functional safety of electrical systems and expressly covers electromagnetic phenomena. It can be applied to robotics as electrical systems. Also, applicable, IEC 61000-6-2 and 61000-6-4 are EMC standards that define immunity and emission requirements, respectively, for electrical and electronic equipment used in industrial environments.
Design for EMC and Safety
A combination of filtering with capacitors and the judicious placement of inductive chokes is required to reduce conducted electromagnetic interference below levels needed to comply with EMC standards and demonstrate that the robot meets all functional safety requirements. Also, electromagnetic shielding may be needed to ensure immunity to radiated interference from external sources and prevent emitted radiation from subsystems such as switching converters mounted on the robot.
The power supply typically represents the frontline in the battle against conducted interference. X and Y capacitors are basic components needed to ensure immunity from external noise and to prevent the robot’s power supply from transmitting interference back into the line. The desired effect of the filter is to remove high-frequency noise as shown in figure 1.
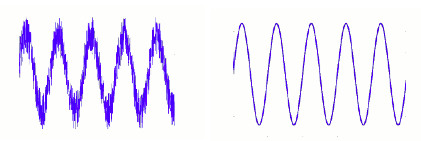
(Figure 1. Line voltage signal without (left) and with (right) X and Y filter capacitors.)
To filter common-mode and differential-mode noise currents on power lines, X capacitors are placed in across-the-line (phase to phase or phase to neutral) locations and Y capacitors are connected from phase-to-ground as figure 2 shows.

(Figure 2. X and Y capacitor connection.)
X and Y capacitors for use in robotic automation systems, as for any industrial application, need to be able to withstand applied voltages significantly above the nominal supply voltage. They must also handle high temperatures and maintain stable characteristics over the full operating range. The properties of polypropylene film capacitors make these devices a strong choice for use as X and Y filter capacitors. Their relatively low cost and self-healing properties that ensure the device maintains its capacitance over an extended period are additional attractive attributes.
KEMET’s F862-V054 metalized polypropylene film X2 capacitors and R41T Y capacitors withstand use in harsh environments and are therefore suited to industrial robotic applications. Both meet AEC–Q200 requirements for automotive qualification, confirming their ability to operate reliably in harsh environmental conditions. The R41T series can be used in Y2 and X1 ‘line-to-ground’ and ‘across-the-line’ connections and is particularly suited to use in situations where a failure of the capacitor could lead to the danger of an electric shock (figure 3).

(Figure 3. An overview of metallized polypropylene & paper film safety capacitors suitable for use in mains-connected applications to minimize the amount of conducted common mode and differential mode electromagnetic interference present in many electrical devices.)
Calculating the capacitor lifetime, to select a suitable component that will enable the robot to meet applicable reliability targets, can be difficult to achieve using datasheet information alone. In particular, the lifetime under expected temperature, humidity, and bias (THB) conditions is impossible to predict. To address this, KEMET has developed the KEMET Life Expectancy Model (K-LEM). Available online as a film-life calculator at the KEMET Engineering Center website (figure X), it is the first tool of its kind that allows users to take THB effects into account when calculating capacitor lifetimes.

(Figure 4. KEMET’s K-LEM calculator offers lifetime predictions for film capacitors under varying conditions, including the effects of temperature, humidity and bias.)
Growing markets for industrial robotic automation present opportunities for equipment designers to deliver next-generation solutions that meet the applicable standards for functional safety and electromagnetic compatibility. Cutting-edge capacitors suitable for EMI suppression filters are readily available, supported by online tools to assist with design and lifetime calculation.
About the Author
Wilmer graduated from the University of Florida and has 14 years of experience in the electronics industry working in design, sales, and marketing. His goal is to bring a sense of fun and levity to technical content while still maintaining scientific technological accuracy. A survivor of Motorola and Blackberry (not his fault), Wilmer leads the KEMET technical marketing team which combines his passion for science and technology with communication and presentation.



