
Don’t Stress Over the Design of an Autonomous Transit Pod Platform
June 25, 2026
Sponsored Blog

Thanks to the latest embedded computers from Vecow, such an autonomous transit pod system can be deployed painlessly.
The technical community is very aware of the capabilities of autonomous vehicles, at least from an outward perspective. By doing a deeper dive into “autonomous transit pod,” we can (and should) define it as a system-level capability rather than a specific application, like the self-driving car. That said, the same architectural principles that will be discussed here could apply to autonomous mobile robots (AMRs), agricultural equipment, drones, warehouse systems, and industrial transport platforms. In each case, the embedded computer is the orchestrator of a closed-loop system that continuously senses, decides, and acts in real time.
Autonomous transit pod requires the use of embedded computing platforms, sensing technologies, and control algorithms to enable a mobile system to perceive its environment, make decisions, and execute motion with reduced or no human intervention.
At a functional level, an autonomous transit pod system typically consists of three tightly coupled domains. The first is perception, where heterogeneous sensors like cameras, radar, lidar, etc., feed data into embedded processors that perform sensor fusion and environmental modeling. The second is cognition or decision-making, where software stacks combine with deterministic control logic and AI/ML inference to interpret the environment, predict outcomes, and plan actions. The third is control, where real-time embedded systems translate planned trajectories into actuator commands for steering, propulsion, braking, or other motion elements.
What distinguishes autonomous transit pod from conventional automation is its need to operate in dynamic, often unstructured environments. That requirement drives the use of high-performance embedded compute (including heterogeneous SoCs with CPUs, GPUs, NPUs, or dedicated accelerators), real-time operating constraints, and increasingly, Edge AI techniques to meet latency, power, and reliability targets.
From an embedded systems perspective, autonomous transit pod is characterized by deterministic timing, functional safety (often aligned with standards like ISO 26262), redundancy, and robust communication between distributed nodes over networks such as CAN, Ethernet, or TSN. The system must also manage constraints around power, thermal budgets, and physical size while maintaining high availability and fault tolerance.
Why Now For Autonomous Transit Pod
The autonomous transit pod is gaining traction because the underlying enablers have finally aligned. Embedded compute has reached the point where heterogeneous SoCs, combining CPUs, GPUs, and NPUs, can execute real-time perception and inference workloads at the Edge without requiring excessive power or thermal budgets. At the same time, sensor costs for cameras, radar, and even lidar have dropped enough to make multi-modal perception economically viable.
On the demand side, the push for operational efficiency is driving adoption across industries. In addition, regulatory momentum around functional safety and autonomy frameworks is providing clearer pathways to deployment.

A key element for autonomous transit pods is the ability to dynamically avoid obstacles, even moving obstacles.
Autonomous Transit Pod In Action
Autonomous transit pods were pushed to the forefront by a global automotive OEM who partnered with a member of its distribution and integration ecosystem to develop a next-generation “green slow mobility” platform. This is an automated vehicle designed to operate safely at around 2 or 3 km/hr. in dense, human-centric environments. The concept targets short-range, low-speed use cases where interaction matters as much as transport, including immersive exhibition installations, event shuttles, and guided retail experiences in crowded indoor venues.
From a system design standpoint, the primary challenge was real-time perception in close proximity to pedestrians. The platform required a dense sensor suite with multiple high-resolution cameras paired with lidar to enable reliable object detection, tracking, and path planning in cluttered, dynamic scenes. This creates a significant amount of data to be processed, particularly when handling uncompressed video streams and synchronizing multi-sensor inputs.
To address this level of complexity, the integrator selected a workstation-class x86 embedded platform from Vecow. With native 10-Gbit/s Ethernet interfaces, the system can aggregate high-bandwidth sensor data with minimal latency, supporting deterministic, Edge-based AI inference and sensor fusion. The result is a responsive, low-speed autonomous platform capable of safe navigation and interactive operation in complex public spaces.
Technical Challenges To Address
For the OEM to succeed with a low-speed autonomous transit pod platform, three practical engineering challenges stand out. The first is power integrity. Mobile platforms often experience voltage drops and transients during startup and shutdown, especially when multiple subsystems like compute, sensors, and actuators initialize simultaneously. Without proper power conditioning, hold-up design, and sequencing, these fluctuations can lead to system instability, corrupted data, or even hardware damage.
Second is environmental robustness. Even at low speeds, operating outdoors or in semi-exposed environments means dealing with vibration from uneven surfaces, as well as wide temperature swings. The embedded system and sensor stack must be ruggedized to maintain performance and reliability under thermal stress and mechanical shock.

Ruggedness and small size are key attributes of autonomous transit pods, as well as the ability to operate in various climates.
Finally, accurate positioning is critical. Reliable localization, whether through GNSS, visual odometry, lidar-based simultaneous localization and mapping (SLAM), or hybrid approaches, is essential not just for navigation, but for fleet coordination and geofencing. Maintaining precise, real-time location awareness ensures predictable behavior, efficient routing, and safe interaction with people and other moving assets.
Assist From Vecow
An integration partner can mitigate the three key challenges discussed, namely power instability, harsh environments, and positioning accuracy, by centering the design on rugged, vehicle-ready platforms like Vecow’s ECX-3000/3071 and ECX-4000/4071. For unstable power conditions, these systems support wide-range DC input with ignition control, power sequencing, and surge/brownout protection. That design ensures clean startup and shutdown behavior, preventing voltage dips from disrupting sensor pipelines or corrupting storage during abrupt power transitions.
To handle outdoor deployment, both platforms are engineered with fanless, industrial-grade thermal designs and validated for shock and vibration tolerance. This allows sustained operation across extended temperature ranges and on uneven terrain without performance throttling or mechanical failure, which is critical for mobile Edge systems operating continuously.
For accurate positioning and fleet coordination, the systems offer flexible high-speed I/O, including 10-Gbit/s Ethernet and PCIe expansion, enabling integration of GNSS modules with RTK correction, lidar, and multi-camera arrays. Combined with precise time synchronization and sufficient compute for real-time sensor fusion, they support robust SLAM. The result is a stable, deterministic Edge platform capable of maintaining precise positioning and reliable operation in dynamic, real-worlds environments.
Specifically, the ECX-3000/3071 platform is well suited for power-sensitive mobile deployments. It supports wide-range DC input with ignition control, controlled power sequencing, and protection against surges and brownouts. This ensures stable startup and shutdown cycles, preventing voltage transients from interrupting sensor data streams or corrupting storage. Its compact, fanless design and support for extended operating temperatures make it reliable in semi-outdoor environments where thermal cycling and vibration are concerns.

Power-protected mobile deployments are becoming a target for autonomous transit pods. One application in particular is for in-vehicle use.
The ECX-4000/4071 targets higher-performance requirements, particularly around perception and positioning. With support for high-bandwidth I/O (10-Gbit/s Ethernet and PCIe expansion), it can aggregate data from multiple high-resolution cameras, lidar, and GNSS modules with RTK correction. This enables tightly synchronized sensor fusion pipelines and real-time SLAM processing. Its ruggedized, vibration-resistant construction ensures consistent performance on uneven terrain, while the additional compute headroom supports deterministic AI inference and precise fleet-level coordination in dynamic environments.
For OEMs developing autonomous transit pod platforms and applications, Vecow brings a combination of rugged hardware, high-performance Edge compute, and system-level design expertise. Its platforms are engineered for real-world deployment, with wide power input ranges, thermal resilience, and vibration tolerance that align with mobile use cases.
Pushing the Envelope With Intel® Compute Power
As a further example of Vecow’s engineering expertise, the company has designed the systems with the latest compute platforms from Intel®. The ECX-3000/3071 employs the Intel® Core™ 200S Series and a 14th/13th/12th Gen Intel® Core™ i9/i7/i5/i3 processor. The system maximizes the latest Performance core (P cores) and ultra-high clock speeds to powerfully process massive amounts of sensor and visual data. This ensures that various Edge computing devices can achieve absolute zero-latency for real-time sensing and critical control responses.
The Vecow ECX-4000/4071 is designed with the Intel® Core™ Ultra 200S Series processor (Arrow Lake). These P cores are engineered for maximum single-threaded speed, ultra-responsive multitasking, and low-latency execution. Built with advanced branch prediction, high clock speeds, deep execution pipelines, and large caches, the cores rapidly process demanding workloads, including real-time applications. Their architecture prioritizes fast instruction handling and sustained peak performance, reducing delays and improving responsiveness under heavy loads. In action, the ECX-4000/4071 P cores combine with a dedicated NPU, the Intel® AI Boost, which delivers up to 36 TOPS. This allows it to handle larger and more complex Edge AI workloads, ensuring deep AI inference capabilities across various advanced intelligent scenarios.
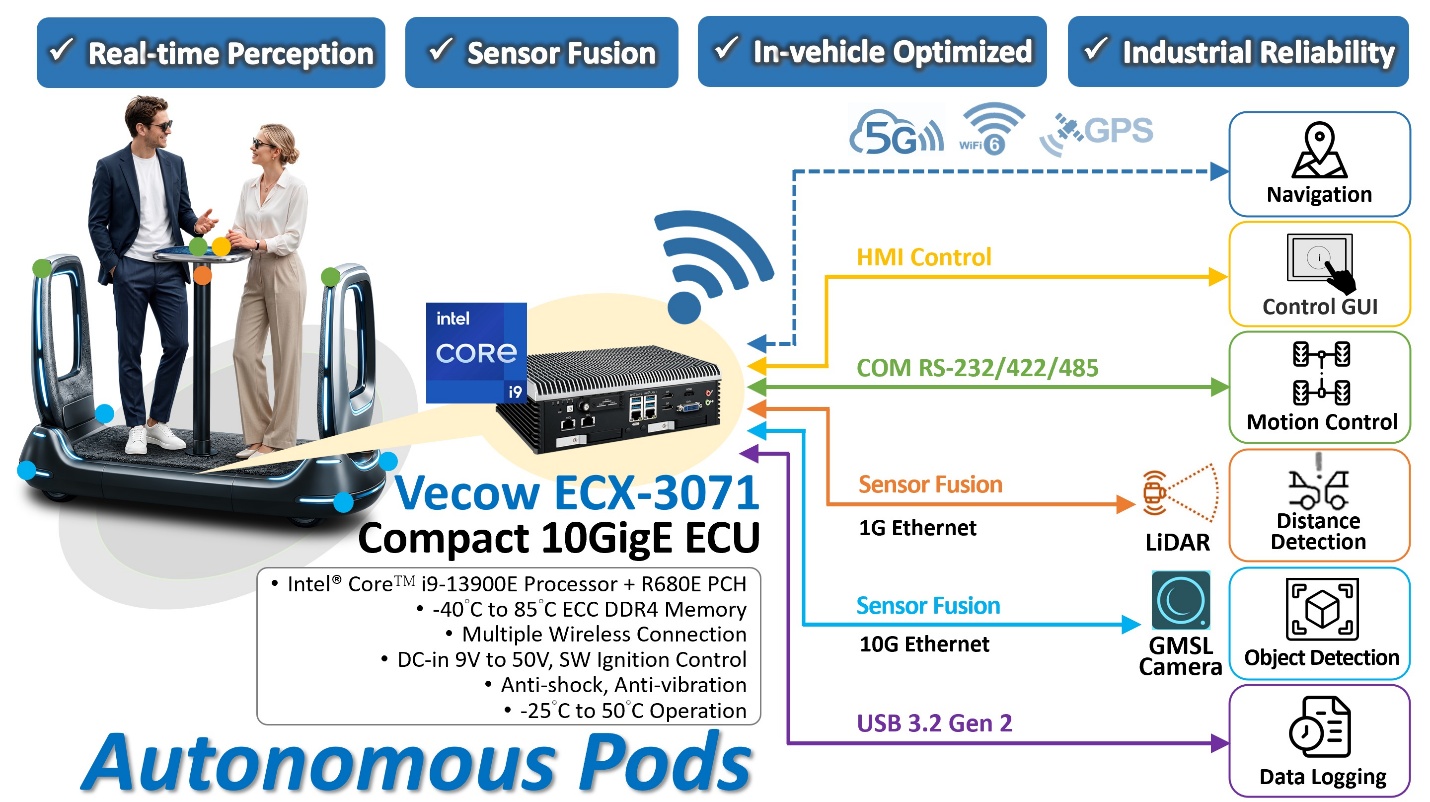
Vecow’s ECX-3000/3071 and ECX-4000/4071 embedded platforms are perfectly suited for autonomous transit pod applications, thanks to their high performance, small size, and robust feature sets.
Beyond hardware, Vecow supports rich I/O integration, as clearly shown in the ECX-3000/3071 and ECX-4000/4071 embedded platforms, to enable scalable sensor fusion and AI workloads at the Edge. Just as important, the company understands long lifecycle requirements, offering stable product roadmaps and support that OEMs need when moving from prototype to volume deployment in autonomous transit pod systems. Contact Vecow today.



